公式ドキュメント及び参考ドキュメント
公式ドキュメントとOpenSourceHardwareコミュニテイの説明で十分なので補足だけ
Duet3D Documentation
Connecting stepper motors
Physical connecting stepper motors to Duet boards
OpenSource Hardware オープンソー…

ステッピングモーターの配線【汎用】
ステッピングモーターの配線について モーターの線の色と名前の関係 配線例 逆に繋ぐとどうなるのか 反対に回ったらどうすればいいか? モーターの線の色と名前の関係 Aval…
目次
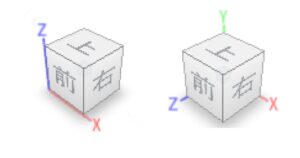
相と極性を調べて対応するように繋ぐ
ステッピングモーターはA+A-B+B- といった相(ABなど)と極性(+-など)があります。
モーターのメーカーによってこれらの相や極性が変わるようなので基本的にはメーカー資料を参考にしてください。
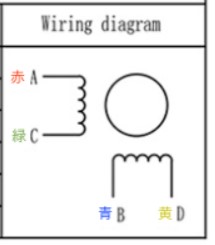
画像のモーターはケーブルの色赤緑青黄がそれぞれA+A-B+B-となっています。
Duet3mini+の配線図を見ると上から順にB-B+A-A+となっています。
これらが対応するように接続します。延長ケーブルの色が違うのが紛らわしい。
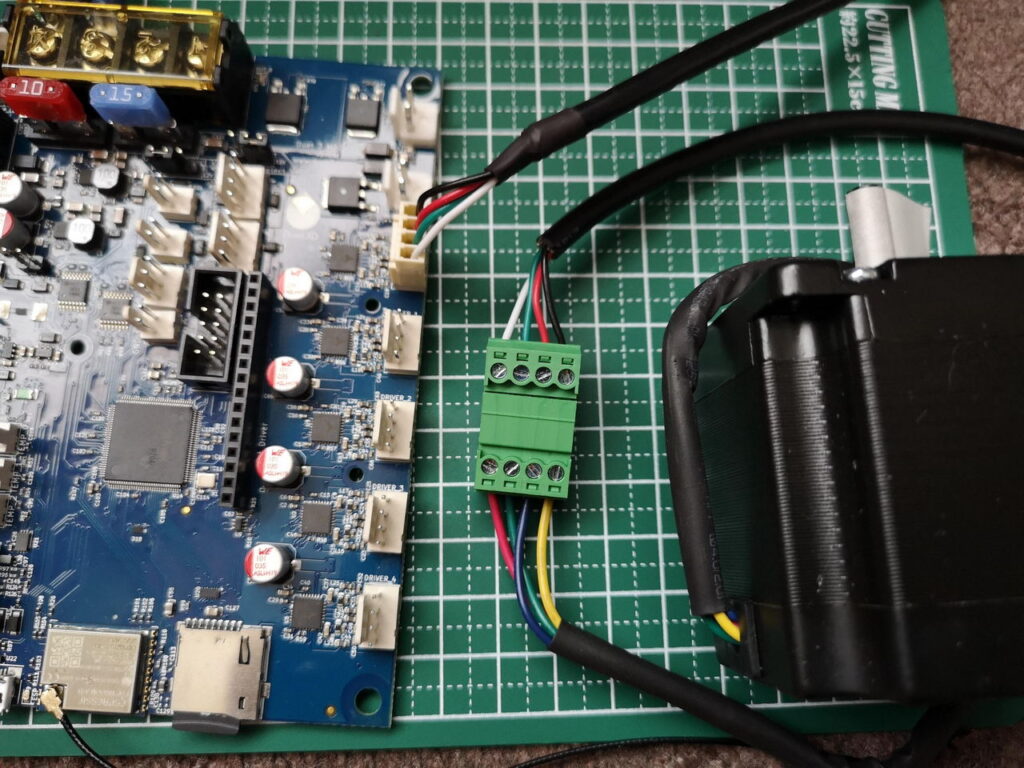
中継コネクタで接触不良が起きやすい話
案件として組み立ての補助や使い方の講習で様々なトラブル対応をしてきましたが、
トラブルの原因はダントツで中継コネクタでの接触不良が多いです。
ケーブル全体を引っ張っても4本中3本がちゃんと刺さっていれば抜けないので、接触不良の1本を見落としてしまうようです。一本づつちゃんと刺さっているか確認しましょう。
モーターの設定
私が設定config.g内で設定している項目は以下のMコマンドです。
軸ごとに値を変えることができる設定は先にM584で軸の定義をしておく必要があるのでM584は先に書いておく必要があります。
| M569 | モータードライバの設定(回転方向反転など) |
| M584 | 軸のマッピング(どのモーターがX、Y、Z軸かの指示) |
| M350 | マイクロステップ設定 |
| M92 | 軸ごとのstep/mm(1mm進むのにモーターをどれだけ回すかの指示) |
| M566 | 許容瞬間速度変化 mm/min |
| M203 | 最大送り速度 mm/min |
| M201 | 最大加速度 mm/sec^2 |
| M906 | 電流設定 mA |
| M564 | ホーミング前、稼働範囲外での動作制限 |